GeeKee CeeBee
Welcome to GeeKee CeeBee's Page: House of Mechatronics Projects & Lessons.
Contact Email: Ceebee1108@gmail.com
Follow me on Youtube
__________________________________________________________________________________________________________________________________
PID DC Motor Position Control
Components List
Arduino Uno (Affiliate Link)
DC Motor Double-ended Shaft (BestTong 775)
L298N Dual H-bridge Motor Driver (Affiliate Link)
2X Rotary Potentiometer (Affiliate Link)
Shaft Coupler (Custom)
DC Power Supply (6-12V)(Affiliate Link)
Jumper Wires and Breadboard (Affiliate Link)
Step-by-step video guide
Control Diagram

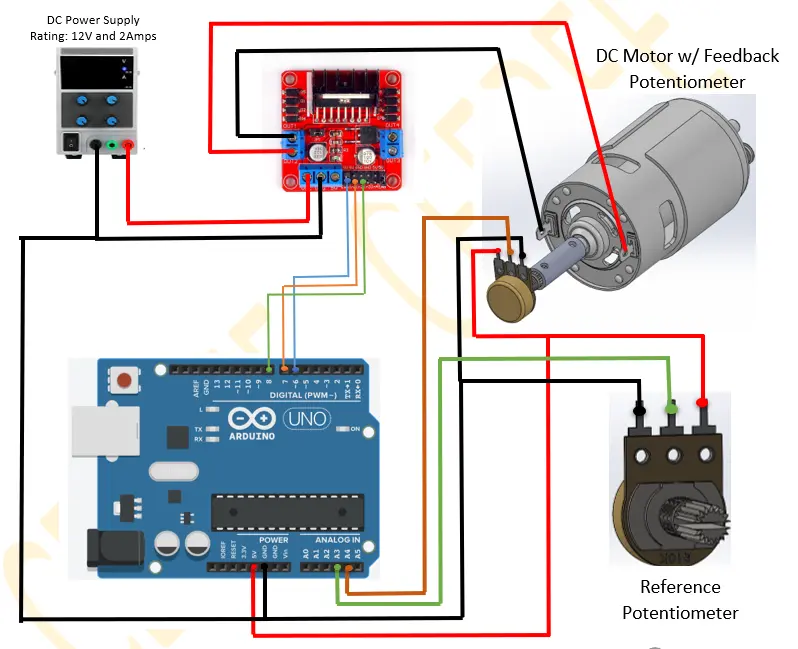
Wiring Diagram
__________________________________________________________________________________________________________________________________
Arduino Code
//GeeKee CeeBee
// ************ DEFINITIONS************
int potPin = A3; // Reference Potentiometer
int encoder_pot = A2; // Position Feedback sensor
int val = 0;
int encoder_val =0;
float kp = 0.2;
float ki = 0.00000 ;
float kd = 2.00;
float Theta, Theta_d;
int dt;
unsigned long t;
unsigned long t_prev = 0;
int val_prev =0;
float e, e_prev = 0, inte, inte_prev = 0;
float Vmax = 12;
float Vmin = -12;
float V = 0.1;
const byte PWMPin = 6;
const byte DirPin1 = 7;
const byte DirPin2 = 8;
//***Motor Driver Functions*****
void WriteDriverVoltage(float V, float Vmax) {
int PWMval = int(255 * abs(V) / Vmax);
if (PWMval > 255) {
PWMval = 255;
}
if (V > 0) {
digitalWrite(DirPin1, HIGH);
digitalWrite(DirPin2, LOW);
}
else if (V < 0) {
digitalWrite(DirPin1, LOW);
digitalWrite(DirPin2, HIGH);
}
else {
digitalWrite(DirPin1, LOW);
digitalWrite(DirPin2, LOW);
}
analogWrite(PWMPin, PWMval);
}
void setup() {
Serial.begin(9600);
pinMode(DirPin1, OUTPUT);
pinMode(DirPin2, OUTPUT);
}
void loop() {
val = analogRead(potPin); // Read V_out from Reference Pot
encoder_val =analogRead(encoder_pot); // Read V_out from Feedback Pot
t = millis();
dt = (t - t_prev); // Time step
Theta = val; // Theta= Actual Angular Position of the Motor
Theta_d = encoder_val; // Theta_d= Desired Angular Position of the Motor
e = Theta_d - Theta; // Error
inte = inte_prev + (dt * (e + e_prev) / 2); // Integration of Error
V = kp * e + ki * inte + (kd * (e - e_prev) / dt) ; // Controlling Function
if (V > Vmax) {
V = Vmax;
inte = inte_prev;
}
if (V < Vmin) {
V = Vmin;
inte = inte_prev;
val_prev= val;
}
WriteDriverVoltage(V, Vmax);
Serial.println(Theta_d); Serial.print(" \t");
Serial.print(Theta); Serial.print(" \t ");
t_prev = t;
inte_prev = inte;
e_prev = e;
delay(10);
}