GeeKee CeeBee
Welcome to GeeKee CeeBee's Page: House of Mechatronics Projects & Lessons.
Contact Email: Ceebee1108@gmail.com
Follow me on Youtube
__________________________________________________________________________________________________________________________________
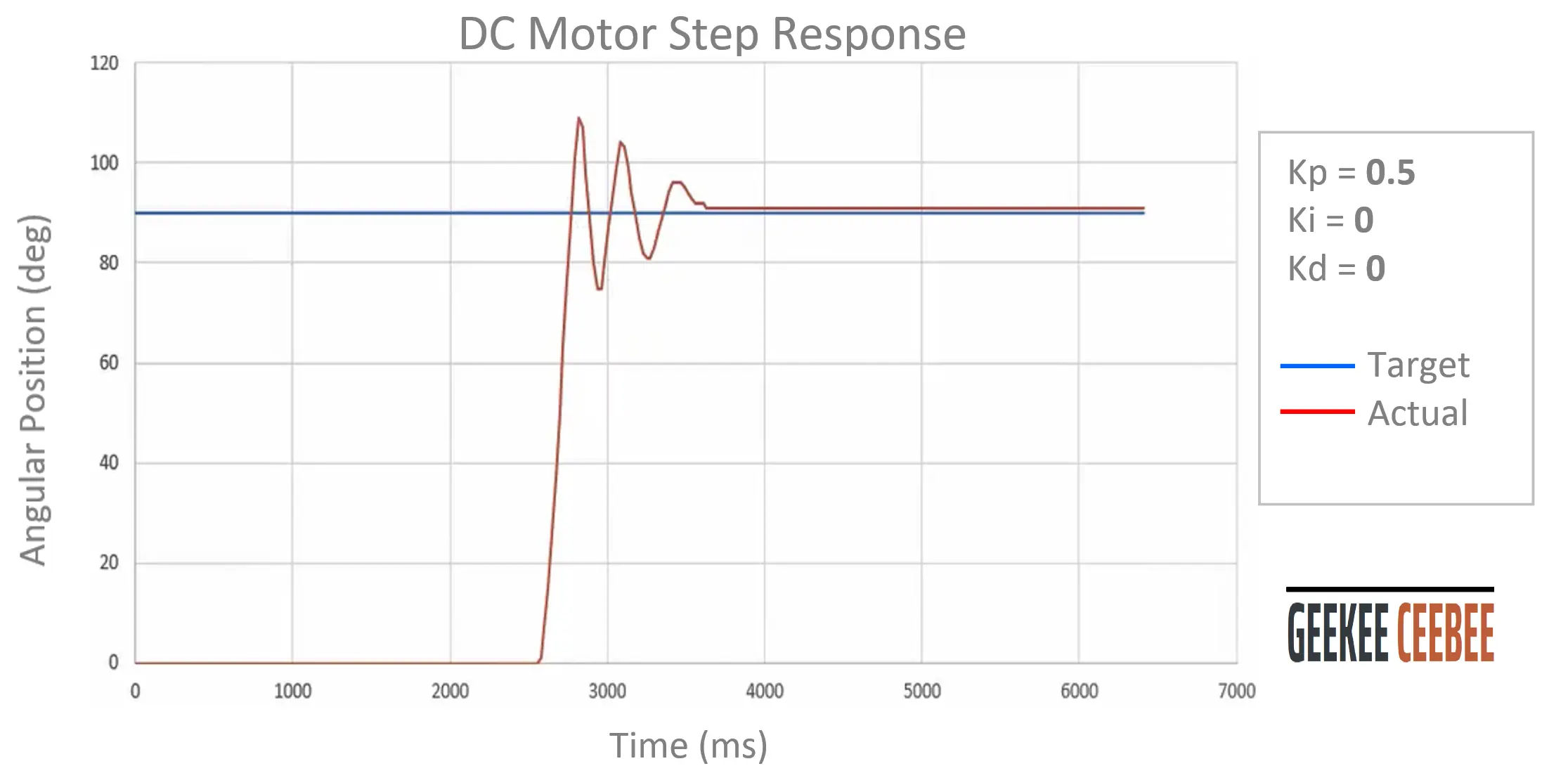
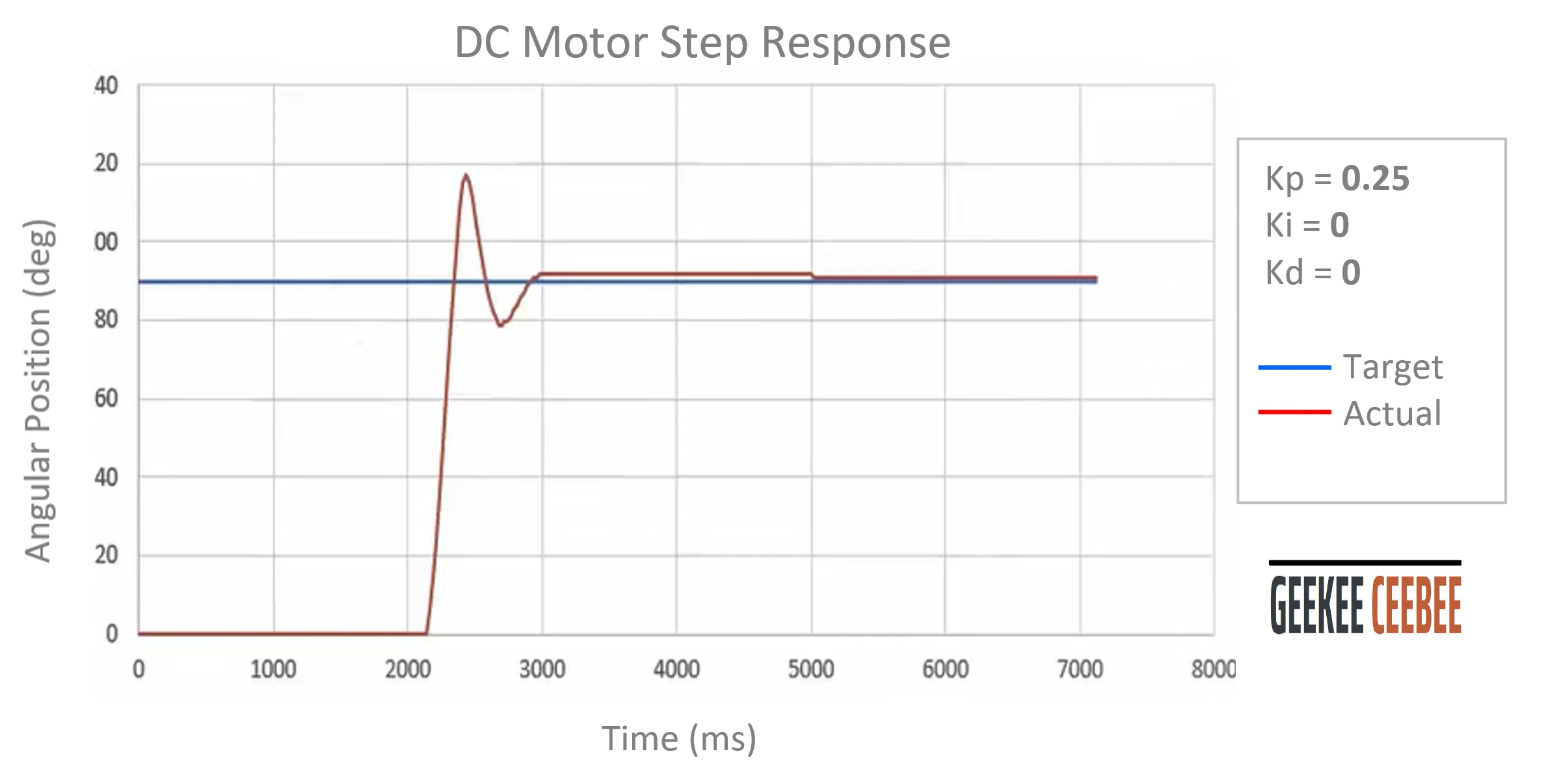
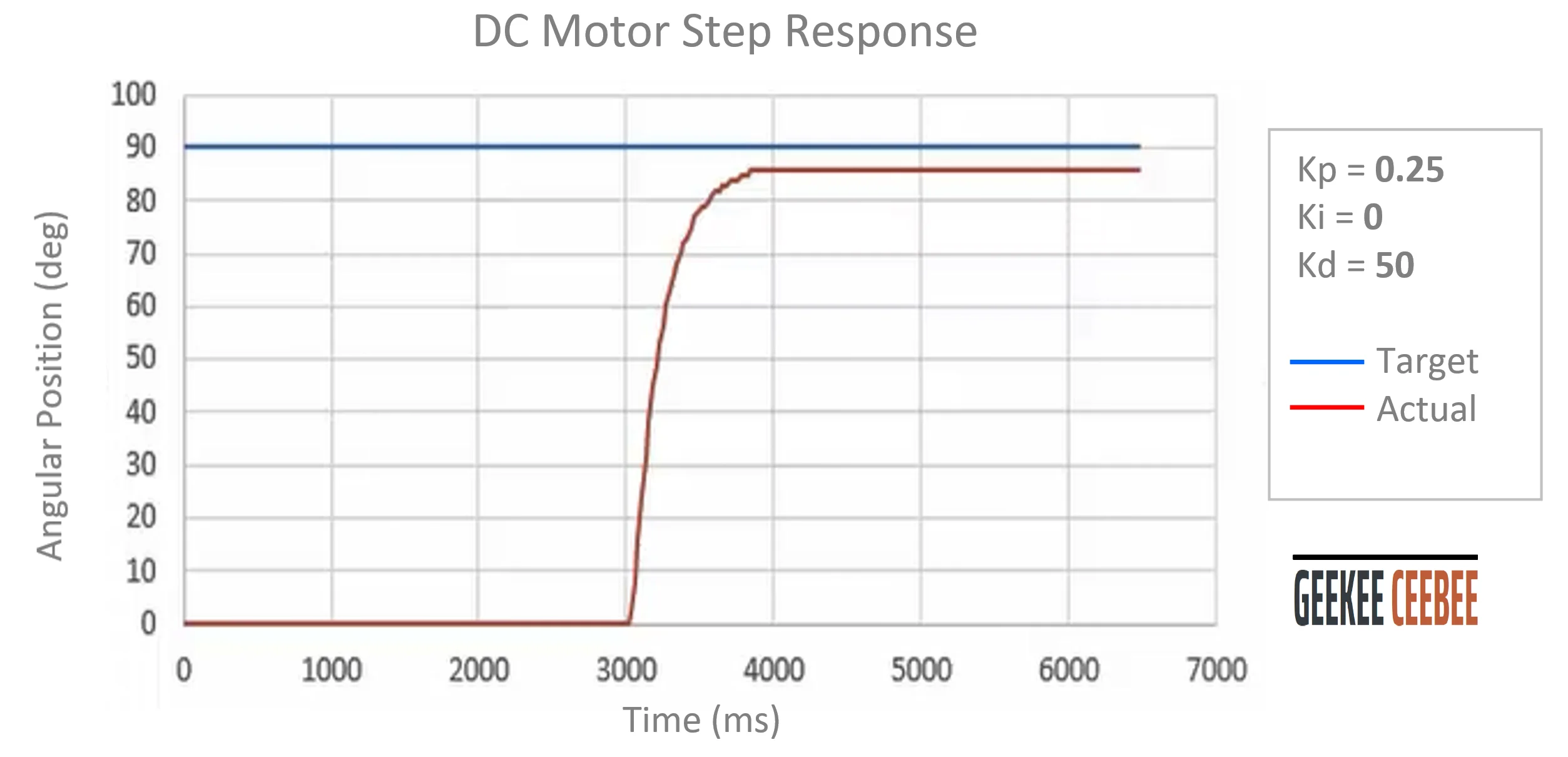
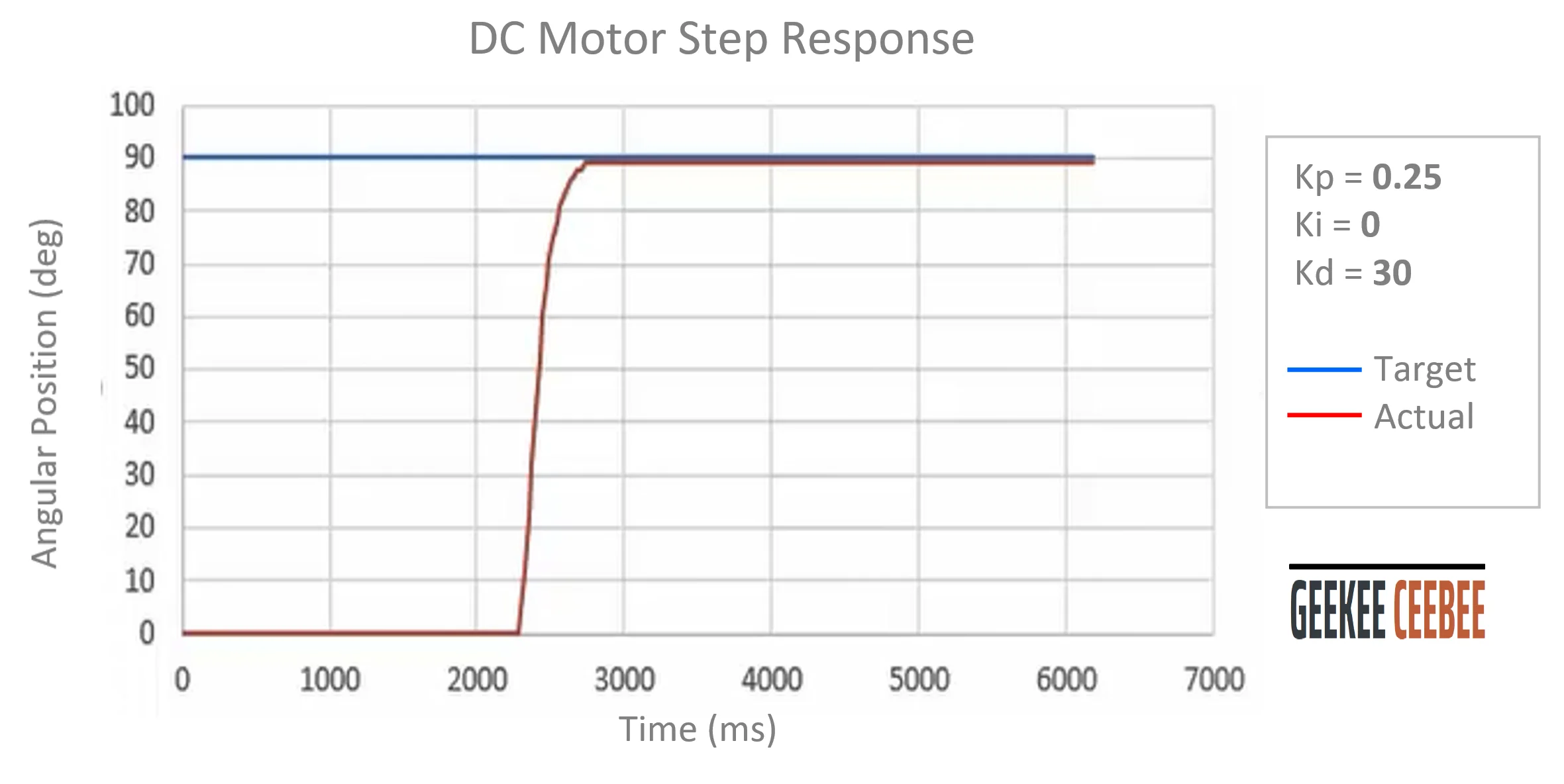
PID TUNING, STEP RESPONSE, DC MOTOR
Step by step practical example of tuning PID controller of a DC motor using Arduino.
Use physical example of tuning PID gains
Physical system includes a DC motor with optical encoder for position feedback
Tune for motor's step response to achieve target position
Components List
Arduino Uno (Affiliate Link)
DC Motor Double-ended Shaft (BestTong 775)
L298N Dual H-bridge Motor Driver (Affiliate Link)
DC Power Supply (6-12V)(Affiliate Link)
Jumper Wires and Breadboard (Affiliate Link)
Demonstration video
Steps




__________________________________________________________________________________________________________________________________