GeeKee CeeBee
Welcome to GeeKee CeeBee's Page: House of Mechatronics Projects & Lessons.
Contact Email: Ceebee1108@gmail.com
Follow me on Youtube
__________________________________________________________________________________________________________________________________
Lane Keeping Assist System Using Steering Wheel
and CARLA Simulator
Demonstration video
__________________________________________________________________________________________________________________________________
Typical Lane Keeping Assist System

__________________________________________________________________________________________________________________________________
CARLA Driving Simulator


__________________________________________________________________________________________________________________________________
MATLAB - Vehicle Lateral and Longitudinal Controller

__________________________________________________________________________________________________________________________________
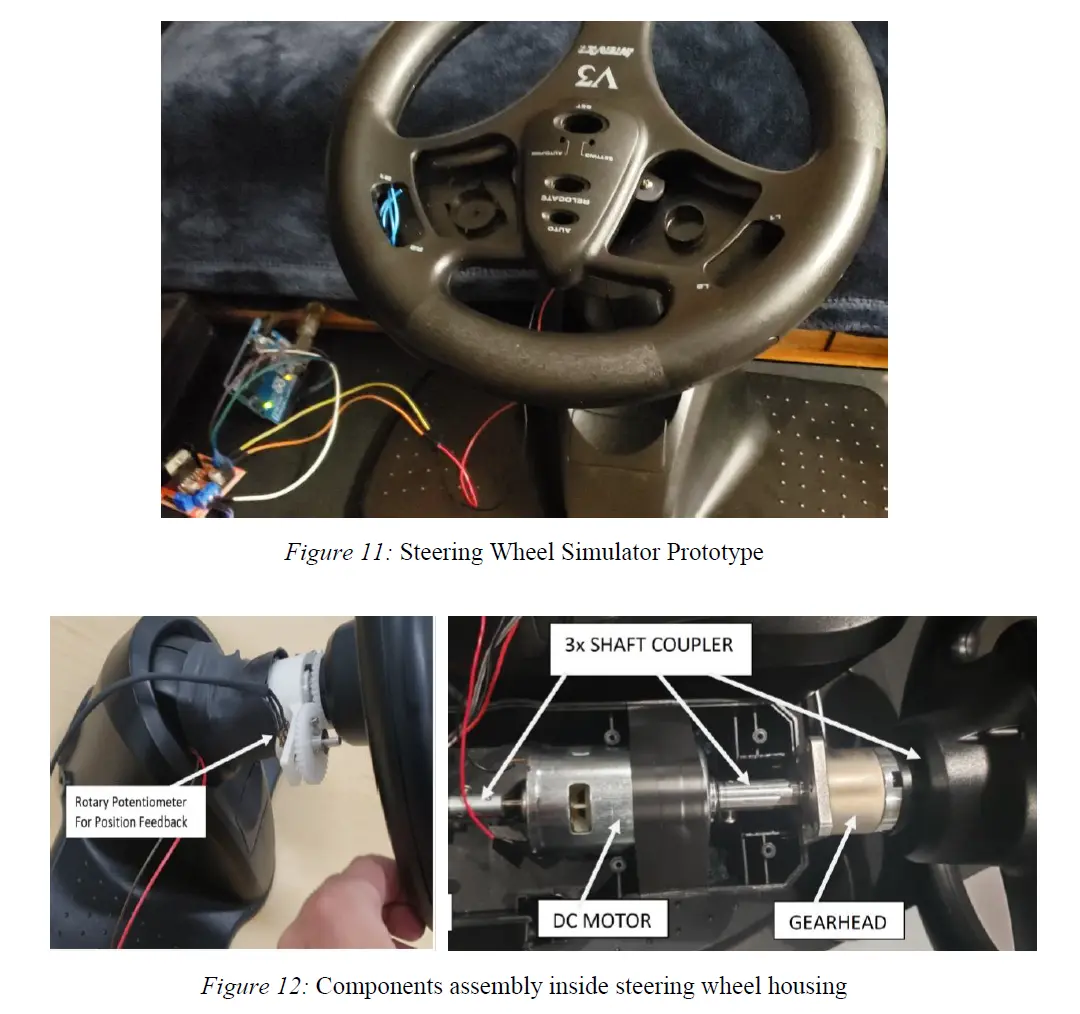
Steering Wheel Construction and CARLA Communication

__________________________________________________________________________________________________________________________________
Controllers

__________________________________________________________________________________________________________________________________
RESULTS- Vehicle Longitudinal and Lateral Controller


__________________________________________________________________________________________________________________________________
RESULTS- Steering Wheel and Pedals Testing with CARLA



__________________________________________________________________________________________________________________________________
CONCLUSION - Summary and Future Work
__________________________________________________________________________________________________________________________________
REFERENCES
__________________________________________________________________________________________________________________________________